FablabJunior Automne 2015/Grenouille : Différence entre versions
| (5 révisions intermédiaires par 3 utilisateurs non affichées) | |||
| Ligne 4 : | Ligne 4 : | ||
|description=Le système analisera les obstacles et les contournera. | |description=Le système analisera les obstacles et les contournera. | ||
|license=CC-by-sa-3.0 | |license=CC-by-sa-3.0 | ||
| − | | | + | |inspiration=Thymio |
| − | |ingrédients=Roue 360°, Bille, | + | |ingrédients=Roue 360°, Bille, servomoteur, morceaux de polyprop', main articulées, diodes, |
}} | }} | ||
| + | |||
| + | |||
| + | Le robot est construit avec les éléments du [[Minibot]] imprimé en 3D | ||
| + | |||
| + | 2 servomoteurs à rotation continue qui activera les 2 roues 360°. | ||
| + | 1 servomoteur simple pour actionner les mains articulées au bout desquelles des diodes s'allumeront. | ||
| + | 1 bille qui servira de roue placée au milieu du système. | ||
| + | 1 globe de polyprop' pour faire la sphère qui recouvrira le système. | ||
| + | |||
| + | |||
| + | Ce qui a abouti au terme de seulement 3 jours de travail : | ||
| + | * base roulante grâce aux 2 servo moteurs à rotation continue | ||
| + | * détecteur d'obstacle grâce au sonar | ||
| + | |||
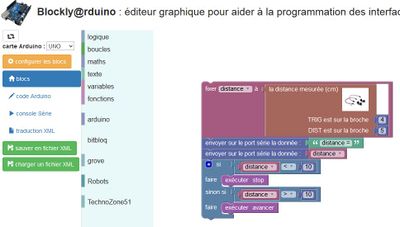
| + | [http://www.technologiescollege.fr/blockly@rduino/index.html?lang=fr?url=./examples/blockly_arduino_grenouille.xml Cliquer ici pour ouvrir le code Blockly@rduino utilisé.] | ||
| + | [[File:blockly_grenouille.JPG|400px]] | ||
| + | |||
| + | Rendez-vous est pris pour nos 2 jeunes "makeuses" avec les OpenAtelier afin de parfaire leurs projets. | ||
Version actuelle en date du 17 novembre 2015 à 13:21
Le système analisera les obstacles et les contournera.

Contributeur·ice·s
Statut du projet
Experimental
Statut de la publication
License
CC-by-sa-3.0
Inspiration
Thymio
Fichiers source
Machines
Lien
Le robot est construit avec les éléments du Minibot imprimé en 3D
2 servomoteurs à rotation continue qui activera les 2 roues 360°. 1 servomoteur simple pour actionner les mains articulées au bout desquelles des diodes s'allumeront. 1 bille qui servira de roue placée au milieu du système. 1 globe de polyprop' pour faire la sphère qui recouvrira le système.
Ce qui a abouti au terme de seulement 3 jours de travail :
- base roulante grâce aux 2 servo moteurs à rotation continue
- détecteur d'obstacle grâce au sonar
Cliquer ici pour ouvrir le code Blockly@rduino utilisé.

Rendez-vous est pris pour nos 2 jeunes "makeuses" avec les OpenAtelier afin de parfaire leurs projets.