DecoupeVinyl/Restauration
modèle graftec 2100

Contributeur·ice·s
Statut du projet
experimental
Statut de la publication
License
GPL
Inspiration
Fichiers source
Machines
Matériaux
Lien
Sommaire
Présentation
Cette découpe vinyl, de marque Graftec, nous a été donné par le collectif echelle inconnue

C'est le modèle FC2100 qui date des années 80


une interface de mathusalem



Il existe des drivers pour windows ...95
Diagnostic
L'alimentation semble morte...
Il est très difficile de trouver de la documentation technique sur ce modèle.
De plus le driver d'origine est obsolète
réparation
Il est décidé de refaire entièrement l'électronique autour de la partie mécanique et moteurs. ça sera l'occasion d'essayer un RaspberryPi pour piloter l'électronique en boucle fermée
démontage
Les actionneurs
Pour le déplacement, il s'agit de moteurs à courant continu pilotés en boucle fermée (avec un encodeur qui renvoie la position réelle du moteur)
En faisant tourner le moteur de l'axe Y avec un multimètre , on mesure ~12V et 1A max

Les moteurs sont installées dans la nacelle gauche de la machine

Le moteur Y et son reducteur (en bas la roues codeuse)

L'axe X est aussi pourvu d'un réducteur à courroies (en bon état)

La carte chargée de la régulation (en haut à gauche les entrées pour les roues codeuses)préhistorique !

Les controleurs moteur semblent difficile à réutiliser car les connexions sont bizarres

La tête de découpe est actionnée par un solénoide. Par contre il faudra enquêter sur la nappe fournie qui l'alimente

La table aspirante est réalisée avec des ventilateurs 100V AC ! on espère qu'on pourra les câbler en série pour les brancher en 220V







l'ensemble pourrait être contrôlé avec un pont en H L298
Les capteurs
Pour informer la machine sur son état, il y a un certain nombre de capteurs
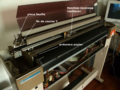
vue d'ensemble de l'implantation des capteurs

Le capteurs de fin de course Y et (au fond, actionné par le levier) le capteur de pincement du papier

un capteur optique, solidaire de la tête de découpe, don la fonction est pour l'instant inconnue

Sur le chariot : un capteur "papier aspiré"(?) à droite et au bout de la petite nappe à gauche, un capteur "lamme baissée"

à l'extrémité droite de l'axe Y, un autre capteur fin de course





les capteurs de rotation des moteurs sont cablés avec 4 fils
- gris = gnd
- orange= 12V ou 5V (?)
- jaune= signal
- blanc= signal
en alimentant le capteur en 12V Le signal sort faiblement (0,5V environ)
peut être une mauvaise tension d'alim ? les modèles actuels de ces encodeurs : http://www.tamagawa-seiki.com/english/encoder/post-5.html sont alimentés en 5V...
En épluchant la doc ici http://www.tjsolution.com/tamagawa/1228n51.pdf qui a trait à des encodeurs de même génération

il semblerai qu'il faille alimenter la ligne de signal à travers une résistance..
en effet!!!
La commande du chariot
La commande a l'air passablement compliquée :
dans la nacelle , ce qui semble un capteur (noté 3HRc) connecté à un circuit avec un 45580JRC (amplificateur)

le fameux capteur .3HRc en situation

quel est ce mystérieux capteur ?


Sur la carte de commande, un relais commande le solénoïde, mais un retour du capteur semble réguler le système à travers un oscillateur(!) NE555P.
En fait, le 555 sert de trigger de schmidt pour "nettoyer" le signal de commande : il 'a donc rien à voir avec le capteur.

mais au fait, comment fonctionne l'effet Hall ?
En fait, on dirait que ça pourrai être un capteur capacitif, ou plus probablement inductif (car il est monté en face d'un biseau de métal, qui l'approche lorsque la lame descend.) Vu le montage, il semble intervenir dans la régulation de l'alimentation du solénoïde.
COnception de l'electronique alternative
Tests avec Arduino
En libre avec arduino (s'il est assez rapide)
Je commence avec le rotoshield Snootlab pour la simplicité du premier abord, masi on risque de devoir faire un montage exprès.
On va utiliser un PID pour piloter la position, grâce à la librairie PID Arduino
http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-direction/
... ce n'est pas évident de régler les paramètres Kp,Ki,et Kd. Dans cette page, un internaute conseille de commencer avec :
- régler Kp avec Ki=0 et Kd=1
- puis Ki pour avoir une valeur finale stable
- puis Kd pour que le système résiste aux déstabilisations extérieures
L'arduino semble un peu trop lent. De plus, le shield snootlab monopolise une des deux interruptions qui seraient utiles pour capter les impulsions venant des encodeurs.
RaspBerry + MD25
Je décide d'utiliser un module MD25 qui sert à contrôler des moteurs pour les robots, associé à un raspberry. Ce module a l'avantage d'être plus puissant (2,8A/moteur) et de gérer directement les encodeurs rotatifs. Cela dit, il ne fait un pilotage qu'en vitesse (ici on a besoin de piloter la position) en récupèrera les infos sur le raspberry pour réaliser cette commande.

Schéma fonctionnel prévu

{kind=link}
Le mystere demeure sur le pilotage de la pression du cutter. Il semblerai que le circuit regle la tension d'alimentation de la bobine de l'electroaimant.
reste à trouver la manière dont ce circuit est commandé.