SentierBattu
routeur CNC

Contributeur·ice·s
Statut du projet
experimental
Statut de la publication
License
GPL
Inspiration
Fichiers source
Machines
Matériaux
Lien
Sommaire
contexte
Dans le cadre d'un Fablab, les étudiants d'I2P(Innovation Produit Process) de l'IUT de Nantes-carquefou et les membres de Ping conçoivent, du 10 avril au 19 avril 2013, un ROUTEUR CNC LIBRE.
Le court délai entre la décision de réaliser le workshop et son début a limité l'optimisation de la machine. On pourrait faire moins cher et plus simple... V2 ?
cahier des charges
Réalisation d'un routeur CNC
Des plaques de contre-plaqués 1250*2500 pourront être usinées. L’outil est conçu démontable. La conception suit les principes du libre, il est réalisable dans la majeur partie avec des outils standards d'un fablab.
pièces spéciales
même si la machine est conçue pour être le plus facilement reproductible, certaines pièces sont tout de même spécifiques
ou nécessitent un travail spécial
- Les engrenages reçus vont être électroérodé pour les adapter aux clavettes des axes des moteurs.

l'axe du moteur a clavette et le pignon brut.

La machine pour l'électroérosion par fil.

Programmation de la machine.

Prête à électroéroder.




- La vis sans fin doit être adapter pour l’accoupler au moteur. Vu la dureté de cette vis, un test d'usinage au tour traditionnel a été réalisé en amont. La vitesse et l’outil ont été établi pour le tournage qui va suivre.

Tournage de la pièce.

L'échantillon ayant subi un test d'usinage au tour traditionnel.


circuit électrique/electronique
Plus ou moins standard, le circuit sera piloté par GRBL via un arduino.
Les composants ne sont pas tous libres, du fait de la difficulté de trouver des contrôleurs moteurs puissants en open hardware par exemple.
Schéma
Le schéma est réalisé avec Qelectrotech , logiciel libre d'électrotechnique

alimentation 220v

circuit 24V
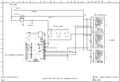
commande Arduino



Au niveau de la sécurité de la machine, si la broche est correctement carénée, on a pas besoin de redondance dans le circuit.
Cablâge
Moteurs
c'est des goldenMotor PK296AE-SG7.2
0,25° /pas 5Nm 4,2A/phase en parallele
C'est des moteurs 8 fils
ils sont accouplés en parallèle

Chronologie
- Jour1 Présentation du projet aux étudiants Conception numérique avec leur outil numérique catia: [1] A la revue du soir les grandes lignes sont tracées. Cédric conçoit le schéma électrique et électronique à base d'arduino de la machine.
-Jour2 La recherche sous catia continue.
A l'atelier les découpes des UPN commencent ( 8 UPN de 1750-100*50 et les deux UPN guides 2000*?) reste deux chutes de 100*100.

UPN: U à profil normal

It's long...isn't it?

Sciage de l'UPN avec scie à ruban automatisée.

Les divers profilés utilisés.




L'electroérosion des engrenages pour mettre des clavettes aura lieu lundi.
Réalisation du rail de guidage à la "belotti" : on fait une maquette du rail qui arrivera trop tard de manière à préfigurer le montage.

Rails de guidage.

Usinage des rails.


Pour la vis sans fin la solution proposée est de l'usiner au tour sur 80(mm) afin d'accoupler la vis à l'axe du moteur. La vis étant traitée pour renforcer la dureté du pas de vis des test ont été nécessaire. Après avoir trancher un échantillon (cf. pièces spéciales), des test d'usinage ont été réalisé pour déterminer le choix de l’outil et les vitesse ( nombre de tour minutes et avance de l'outil vers la pièce) Les poulies de guidages ont été usinées au tour traditionnel.
9 Giga de données dans la base de données de l'iut ont été produits entre hier 9h40 et aujourd'hui 17h15!!! ( bon y a quelques doublons )
-Jour3 L'éléctroérosion a eu lieu. Les rails de guidage ont été fini à la belotti. Découpage au plasma des équerres du châssis. Découpage au plasma des plaques de l'axe Y. Découpe des profilés Bosh. Montage des profilés Bosh.
-Jour4 Montage du châssis Implantation des éléments électriques d'alimentation et de commande dans le boîtier électrique.
-Jour5 Montage des pieds et soudage des équerres. Retournement du châssis. Installation des crémaillères. Évaluation de la place de l'axe Y mobile par rapport aux crémaillères.