FablabJunior Automne 2015/SuiveurDeLigne : Différence entre versions
(→Construction) |
|||
| Ligne 19 : | Ligne 19 : | ||
Le robot est construit avec les éléments du [[Minibot]] imprimé en 3D | Le robot est construit avec les éléments du [[Minibot]] imprimé en 3D | ||
| + | |||
| + | pour éviter aux roues de patiner, on les entoure d'un morceau de chambre à air | ||
| + | |||
| + | [[File:pneu.JPG|300px]] | ||
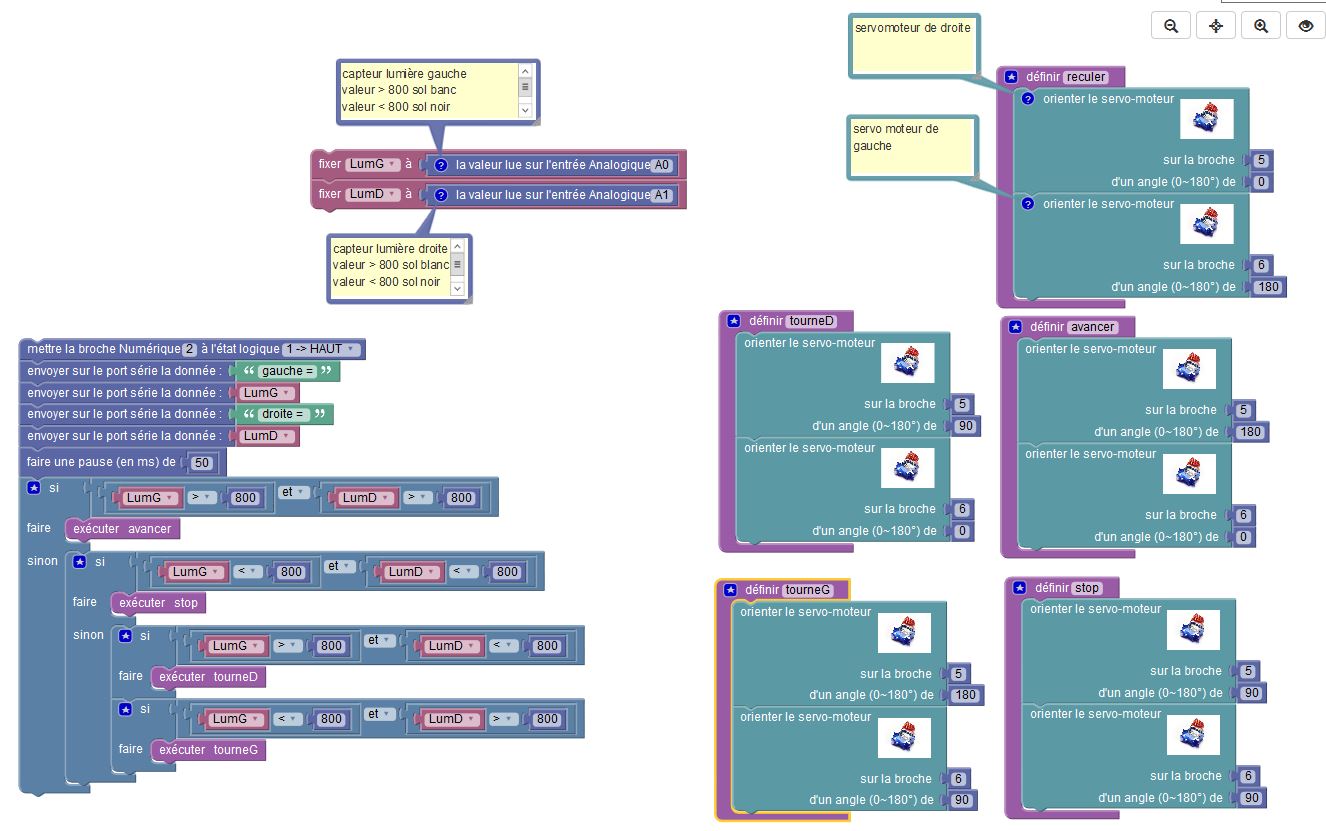
Sont scotchés dessus 2 photorésistance (ou LDR) qui varient en fonction de l'intensité lumineuse, donc le courant mesuré en entrée de A0 & A1 est analogique : il varie constamment. On a mesuré les seuills quand ils sont au-dessus d'une table blanche ou bien quand ils sont au dessus d'une ligne noire. Des détails ici sur wikipedia [http://www.wikiwand.com/fr/Photor%C3%A9sistance] ou sur MCHobby [http://mchobby.be/wiki/index.php?title=Photo-r%C3%A9sistance]. | Sont scotchés dessus 2 photorésistance (ou LDR) qui varient en fonction de l'intensité lumineuse, donc le courant mesuré en entrée de A0 & A1 est analogique : il varie constamment. On a mesuré les seuills quand ils sont au-dessus d'une table blanche ou bien quand ils sont au dessus d'une ligne noire. Des détails ici sur wikipedia [http://www.wikiwand.com/fr/Photor%C3%A9sistance] ou sur MCHobby [http://mchobby.be/wiki/index.php?title=Photo-r%C3%A9sistance]. | ||
Version actuelle en date du 17 novembre 2015 à 15:04
SWAG!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!$$$$$$$$$$$$$$

Contributeur·ice·s
Statut du projet
Experimental
Statut de la publication
License
CC-by-sa-3.0
Inspiration
le swag
Fichiers source
Machines
Matériaux
Lien
Sommaire
Dessin

besoin de : 2 cerveaux moteurs, 2 led rouges, 2 détécteur infrarouge, 1 socle à piles, 4 roues, 1 arduino
Construction
Le robot est construit avec les éléments du Minibot imprimé en 3D
pour éviter aux roues de patiner, on les entoure d'un morceau de chambre à air

Sont scotchés dessus 2 photorésistance (ou LDR) qui varient en fonction de l'intensité lumineuse, donc le courant mesuré en entrée de A0 & A1 est analogique : il varie constamment. On a mesuré les seuills quand ils sont au-dessus d'une table blanche ou bien quand ils sont au dessus d'une ligne noire. Des détails ici sur wikipedia [1] ou sur MCHobby [2].
Programmation
e programme doit gérer : que faire et à quel moment ? Nous avons d'abord défini les fonctions usuelles : avancer, reculer, tourner, etc en fonction de la réalité de rotation pour chaque servomoteur. En effet 180° est pour dire d'avancer ou reculer ? Ca dépend de la fonction qu'on a eu de fixer le servomoteur...
Cliquez ici pour ouvrir le programme dans Blockly@rduino :