FablabJunior Automne 2015 : Différence entre versions
(→des sources d'inspiration) |
(→Les projets des enfants) |
||
| (40 révisions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 3 : | Ligne 3 : | ||
10 à 15 ans à Plateforme C en Automne 2015 | 10 à 15 ans à Plateforme C en Automne 2015 | ||
| + | [[File:FablabJunior_Automne_2015_groupe.jpg|500px]] | ||
==éléments de départ== | ==éléments de départ== | ||
| Ligne 11 : | Ligne 12 : | ||
| − | + | [http://www.musclewires.com/MWMovingHandKits.php MuscleWire] : le doigt + fleur carnivore à ultrasons | |
| + | -> [https://www.youtube.com/watch?v=zT1iDtDvx58 vidéo] | ||
| − | [http://www.rapiro.com/ | + | [http://www.rapiro.com/ Rapiro] un robot qui marche bizarrement |
| + | -> [http://vimeo.com/85309981 vidéo] | ||
| − | [https://www.youtube.com/watch?v=r8lQVhET1Mo | + | [https://www.youtube.com/watch?v=r8lQVhET1Mo vidéo d'un hexapode 3 servo-moteurs] |
| − | [https://www.youtube.com/watch?v=u4ZScJsaepg | + | [https://www.youtube.com/watch?v=u4ZScJsaepg vidéo d'une pince adaptative] festo |
| − | |||
| + | [https://www.youtube.com/watch?v=pCtA5kX-Ktg vidéo des machines folles] de theo Jansen | ||
| − | + | ||
| + | [http://www.simplebotics.com/2015/09/kamibot-turns-paper-crafts-into-app-controlled-robots.html Kamibot] ou l'art de déguiser son robot | ||
| + | |||
| + | |||
| + | bras robot [[Arm-robot]] : | ||
| + | [[File:MeArm.JPG|400px]] | ||
| + | |||
| + | [http://www.instructables.com/id/Pocket-Sized-Robot-Arm-meArm-V04/ tout savoir sur son montage] | ||
| + | |||
| + | [http://fablabo.net/mediawiki/images/DocArm.pdf télécharger le manuel de montage] | ||
| + | |||
| + | |||
| + | [[RobOOrigami]] | ||
| + | |||
| + | |||
| + | robot "cagette" [[Plateforme_robot_eco]] | ||
| + | |||
| + | |||
| + | [http://robot.technologiescollege.fr/spip.php?rubrique13 d'autres idées...] | ||
===du matériel et des outils=== | ===du matériel et des outils=== | ||
| + | |||
| + | |||
| + | * un arduino micro | ||
| + | * 3 servomoteurs | ||
| + | * un capteur ultrason de distance | ||
| + | |||
| + | |||
| + | Les outils : | ||
| + | |||
| + | * imprimante 3D | ||
| + | * découpe vinyl | ||
| + | * découpe laser | ||
| + | |||
| + | |||
| + | Les logiciels | ||
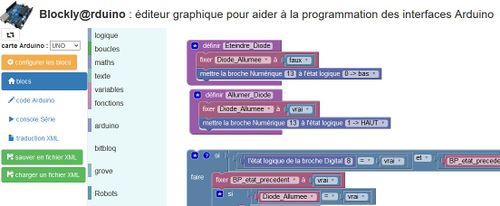
| + | * [http://www.technologiescollege.fr/blockly@rduino/?lang=fr '''Blockly@rduino'''] pour programmer l'arduino | ||
| + | |||
| + | [[File:blockly@rduino.JPG|500px]] | ||
| + | |||
| + | * '''''Indispensable''' pour envoyer le programme dans la carte'' : [https://codebender.cc/static/plugin le plugin Codebender] | ||
| + | |||
| + | * [[Inkscape]] et [[Blender]] pour dessiner les pièces de robot | ||
| + | |||
| + | |||
| + | Les techniques de fabrications par pliage de plastique (polypropylène) et découpe de bois sont évoquées | ||
| + | |||
| + | à cause d'une panne de découpe laser, nous avons finalement utilisé beaucoup de [[Minibot]] imprimé en 3D | ||
===un sujet=== | ===un sujet=== | ||
| + | à l'aide du matériel proposé et des outils à disposition | ||
| + | |||
| + | imaginer un robot ou une partie de robot qui effectue une action programmée (se déplacer, prendre quelque-chose, ou détecter un évènement) | ||
| + | |||
| + | Vous avez la possibilité d'imaginer aussi un habillage à la machine, en utilisant les techniques proposées | ||
| + | |||
| + | |||
| + | |||
| + | ==Les projets des enfants== | ||
| + | |||
| + | {{#ask: | ||
| + | [[FablabJunior_Automne_2015/Projet1||FablabJunior_Automne_2015/Projet2||FablabJunior_Automne_2015/Projet3||FablabJunior_Automne_2015/Projet4||FablabJunior_Automne_2015/Projet5||FablabJunior_Automne_2015/Projet6||FablabJunior_Automne_2015/Projet7||FablabJunior_Automne_2015/Projet8||FablabJunior_Automne_2015/Projet9||FablabJunior_Automne_2015/Projet10]] | ||
| + | | limit=9 | ||
| + | | sort=Date de modification | ||
| + | | order=descending | ||
| + | | ? | ||
| + | | ?Description | ||
| + | | ?Image | ||
| + | |format=template | ||
| + | |template=ListeProjets | ||
| + | |headers=hide | ||
| + | |link=none | ||
| + | |offset= }} | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | [[FablabJunior Automne 2015/Projet1|robot mobile, comme un tank, avec une tourelle mobile]] | ||
| + | |||
| + | [[File:tank.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet2|robot mobile, comme un tank, suiveur de ligne]] | ||
| + | |||
| + | [[File:suiveur.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet3|insecte hexapode à 3 servomoteurs]] | ||
| + | |||
| + | [[File:hexa3.1.jpg|200px]][[File:hexa3.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet4|"grenouille" mobile avec pinces, dos ouvrant comme une coquille]] | ||
| + | |||
| + | [[File:cox.fj.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet5|robot mobile, comme un tank, avec une pince molle comme celle de Festo]] | ||
| + | |||
| + | [[File:pince.fj.2.jpg|200px]][[File:pince.fj.3.jpg|200px]][[File:pincefj.1.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet6|véhicule à 4 roues avec une pince qui se ferme à proximité d'un objet dans le fond de la pince (capteur HC-SR04)]] | ||
| + | |||
| + | [[File:vehicule.bouche.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet7|recherche d'un poulpe/crabe ?]] | ||
| + | |||
| + | [[File:pieuvre.fj.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet8|robot se déplaçant de façon aléatoire grâce aux vibrations]] | ||
| + | |||
| + | [[File:vibreur.fj.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet9|bras souple pliant avec pince MeArm]] | ||
| + | |||
| + | [[File:fj.insct.jpg|200px]] | ||
| + | |||
| + | [[FablabJunior Automne 2015/Projet10|plate forme mobile lumineuse]] | ||
| + | [[File:podLum.jpg|200px]] | ||
| + | <gallery> | ||
| + | File:cox.fj.jpg | ||
| + | File:fj.insct.jpg | ||
| + | File:pieuvre.fj.jpg | ||
| + | File:pince.fj.2.jpg | ||
| + | File:pince.fj.3.jpg | ||
| + | File:pincefj.1.jpg | ||
| + | File:podLum.jpg | ||
| + | File:suiveur.jpg | ||
| + | File:tank.jpg | ||
| + | File:vehicule.bouche.jpg | ||
| + | File:vibreur.fj.jpg | ||
| + | </gallery> | ||
Version actuelle en date du 17 novembre 2015 à 14:45
Sommaire
Stage avec des enfants autour des thèmes Robotique et fabrication numérique
10 à 15 ans à Plateforme C en Automne 2015

éléments de départ
des sources d'inspiration
MuscleWire : le doigt + fleur carnivore à ultrasons -> vidéo
Rapiro un robot qui marche bizarrement
-> vidéo
vidéo d'un hexapode 3 servo-moteurs
vidéo d'une pince adaptative festo
vidéo des machines folles de theo Jansen
Kamibot ou l'art de déguiser son robot
bras robot Arm-robot :
tout savoir sur son montage télécharger le manuel de montage

robot "cagette" Plateforme_robot_eco
du matériel et des outils
- un arduino micro
- 3 servomoteurs
- un capteur ultrason de distance
Les outils :
- imprimante 3D
- découpe vinyl
- découpe laser
Les logiciels
- Blockly@rduino pour programmer l'arduino

- Indispensable pour envoyer le programme dans la carte : le plugin Codebender
Les techniques de fabrications par pliage de plastique (polypropylène) et découpe de bois sont évoquées
à cause d'une panne de découpe laser, nous avons finalement utilisé beaucoup de Minibot imprimé en 3D
un sujet
à l'aide du matériel proposé et des outils à disposition
imaginer un robot ou une partie de robot qui effectue une action programmée (se déplacer, prendre quelque-chose, ou détecter un évènement)
Vous avez la possibilité d'imaginer aussi un habillage à la machine, en utilisant les techniques proposées
Les projets des enfants



 FablabJunior Automne 2015/JorgeBoucheavance automatiquement ferme sa bouche quand il y quelque chose a l'intérieur
FablabJunior Automne 2015/JorgeBoucheavance automatiquement ferme sa bouche quand il y quelque chose a l'intérieur
robot mobile, comme un tank, avec une tourelle mobile

robot mobile, comme un tank, suiveur de ligne

insecte hexapode à 3 servomoteurs


"grenouille" mobile avec pinces, dos ouvrant comme une coquille

robot mobile, comme un tank, avec une pince molle comme celle de Festo




robot se déplaçant de façon aléatoire grâce aux vibrations

bras souple pliant avec pince MeArm

