FablabJunior Automne 2015/Flieuvre : Différence entre versions
De fablabo
m (Cedric a déplacé la page FablabJunior Automne 2015/Il Va Te Tuer vers FablabJunior Automne 2015/Flieuvre) |
|||
| Ligne 1 : | Ligne 1 : | ||
{{Projet | {{Projet | ||
|status=Experimental | |status=Experimental | ||
| − | |image= | + | |image=flieuvre.complete.JPG |
| − | |description=Robot qui ferme des | + | |description=Robot qui ferme des tentacules a l'aproche d'une main! |
|license=CC-by-sa-3.0 | |license=CC-by-sa-3.0 | ||
|contributeurs=Thomas, Thomas Thomas et Thomas sont les constructeurs, | |contributeurs=Thomas, Thomas Thomas et Thomas sont les constructeurs, | ||
| Ligne 13 : | Ligne 13 : | ||
==prototypage== | ==prototypage== | ||
| + | |||
| + | On commence par un dessin : | ||
| + | |||
| + | [[Image:Pieuvre.fj.jpg|200px]] | ||
| Ligne 35 : | Ligne 39 : | ||
[[File:Flieuvre.socle.svg|300px]] | [[File:Flieuvre.socle.svg|300px]] | ||
| + | |||
| + | |||
| + | ==montage== | ||
| + | |||
| + | <gallery> | ||
| + | File:Flieuvre.decoupes.jpg|Les bras sont découpés dans le polypro avec la découpe laser | ||
| + | File:flieuvre.bras.jpg| puis assemblés | ||
| + | File:flieuvre.coeur.interieur.jpg| les coeur accueil tous les composants électroniques | ||
| + | File:flieuvre.coeur.servo.jpg|le servo qui tire les fils | ||
| + | File:Flieuvre.coeur.capteur.jpg|le capteur de distance pour détecter quand on approche la main | ||
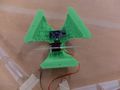
| + | File:flieuvre.complete.JPG| enfin la bête est prête à manger des mains ! | ||
| + | </gallery> | ||
| + | |||
Version actuelle en date du 4 novembre 2015 à 12:31
Robot qui ferme des tentacules a l'aproche d'une main!

Contributeur·ice·s
Statut du projet
Experimental
Statut de la publication
License
CC-by-sa-3.0
Inspiration
RoBOOrigami
Fichiers source
Machines
Matériaux
Lien
Sommaire
prototypage
On commence par un dessin :

on a fait une tentacule en papier pour essayer
conception
fait avec blender
Le coeur est imprimé en 3D
File:flieuvre.assemblee.2.blend.zip
les pétales sont découpés à la laser

Le socle est découpé dans du medium 3mm

montage

Les bras sont découpés dans le polypro avec la découpe laser

puis assemblés
les coeur accueil tous les composants électroniques

le servo qui tire les fils

le capteur de distance pour détecter quand on approche la main

enfin la bête est prête à manger des mains !




